PID-Regulation
 ->
->
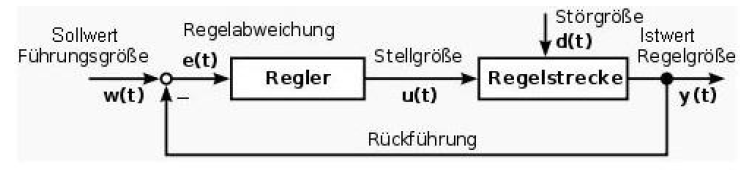
Übersichtsschaltbild
Dieser Funktionsbaustein kann als P-, I-, PI-, PD- oder PID-Regler verwendet werden
Funktion
-
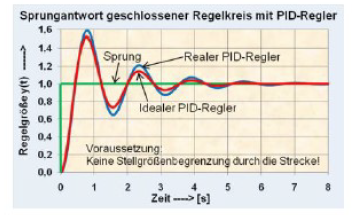
Der PID-Regler steuert automatisch physikalische Größen in einem Prozess, damit ein vorgegebener Sollwert möglichst genau eingehalten wird – auch bei Störungen
-
Vergleich von Soll- und Istwert:
- Regler misst kontinuierlich die Regelgröße (Istwert)
- Vergleicht diese mit der Führungsgröße (Sollwert)
- Aus der Differenz (Regelabweichung) wird eine Stellgröße berechnet, die den Prozess beeinflusst
-
Ziel:
- Die Regelabweichung im eingeschwungenen Zustand möglichst minimal halten
-
Berücksichtigung des Zeitverhaltens:
- Da Prozesse zeitabhängig reagieren, kompensiert der Regler die Dynamik der Regelstrecke
- So erreicht die Regelgröße den Sollwert in gewünschter Form (von aperiodisch bis leicht schwingend)
-
Risiken bei falscher Einstellung:
- Zu langsame Regelung
- Große Regelabweichungen
- Ungedämpfte Schwingungen der Regelgröße
- Im schlimmsten Fall Beschädigung der Regelstrecke
-
Flexibilität:
- Der Baustein kann als P-, I-, PI-, PD- oder PID-Regler eingesetzt werden
Anlegen
- Mit dem grünen Plus-Symbol können Sie eine neue Regelung anlegen
- Wählen Sie anschließend Ausgänge und RID Regulation

Name
- Geben Sie einen Namen für den Baustein an
Istwert/Sollwert
- Wählen Sie beispielsweise „Fix Value“ und eine Temperatur von z. B. 65 °C
- Alternativ haben Sie auch die Möglichkeit, einen variablen Sollwert festzulegen, der beispielsweise in Abhängigkeit der Außentemperatur angepasst wird
Updaterate
- Geben Sie hier an, wie oft die Regelung aktualisiert werden soll
positiv/negativ
- Hier geben Sie die Regelrichtung vor
- Bei einer Überschussregelung wird diese Funktion beispielsweise auf negativ eingestellt
Min. Abweichung
- Hier legen Sie den kleinsten Änderungsschritt fest
YMin
- Legen Sie hier den Startwert fest
- Dieser beginnt üblicherweise bei 0, er kann jedoch auch höher liegen z.B.: 20
YMax
- Legen Sie hier den Endwert fest
- Dieser Wert ist üblicherweise bei 100, er kann jedoch auch niedriger liegen
Kp
- Hier geben Sie den Proportionalanteil an, siehe P-Regler
Ki
- Hier geben Sie den Integralanteil an, siehe I-Regler
Kd
- Hier geben Sie den Differentialanteil an, siehe D-Glied
Schnittstelle
- Wählen Sie die Schnittstelle die den Wert ausgeben soll
Freigabe
- Hier können Sie durch eine anderen Baustein die Regelung ein oder ausschalten
no Log / Log Local / Log Portal
-
Legen Sie fest, ob die Werte
-
nicht aufgezeichnet,
-
am Gerät gespeichert oder
-
im Portal aufgezeichnet werden sollen
-
Bestätigen Sie die Eingaben zweimal mit OK und anschließend mit Speichern
Reglerarten
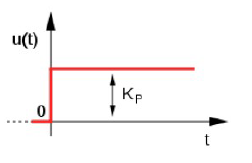
P-Regler
- Sprungantwort P-Anteil
- Der P-Regler besteht ausschließlich aus dem proportionalen Anteil Kp
- Sein Ausgangssignal u ist direkt proportional zum Eingangssignal e
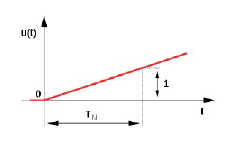
I-Regler
- Sprungantwort I-Anteil
- Ein I-Regler (integrierender Regler, I-Glied) wirkt durch zeitliche Integration der Regelabweichung e(t) auf die Stellgröße
- Die Wirkung wird durch die Nachstellzeit TN gewichtet
D-Glied
- Sprungantwort des idealen D-Gliedes
- Das D-Glied wirkt als Differenzierer und wird nur in Kombination mit P- und/oder I-Reglern eingesetzt
- Es reagiert nicht auf die Höhe der Regelabweichung e(t), sondern auf deren Änderungsgeschwindigkeit
Empirische Dimensionierung
- In der Praxis werden Regelkreise oft ohne exaktes Modell dimensioniert
- Die Reglerparameter werden anhand von praktischen Erfahrungswerten voreingestellt und dann angepasst
- Diese Methode eignet sich vor allem für einfache Systeme
Die Vorgehensweise sieht dabei folgendermaßen aus
- P-Anteil klein wählen, I- und D-Anteil auf 0 setzen
- P-Anteil erhöhen: Langsam steigern, bis die Dämpfung kritisch wird. Bei Schwingungen P leicht reduzieren
- I- und D-Anteil hinzufügen: Nach und nach erhöhen, bis ein akzeptables Regelverhalten erreicht ist