# Adam 4022T
## Funktion
Hier können Sie das Zubehör *Adam 4022T* im SmartDog einbinden
[](https://anleitung.smart-dog.eu/uploads/images/gallery/2024-01/jUdLxQTxoeGVqIzT-image-1705588257982.png)
## Hinweis
Die Remote IO Schnittstelle „ADAM“ ist standardmäßig auf
BUS-Adresse 1 eingestellt. Werden zusätzlich BUS-Zähler
oder Wechselrichter angeschlossen, muss die Adresse der
angeschlossenen Geräte angepasst werden.
Vor der Erst-Inbetriebnahme müssen die Jumper am ADAM
richtig gesetzt werden. Diese Konfiguration ist abhängig
von den Vorgaben des Energieversorgers.
**Gehen Sie dazu wie folgt vor**
* Lösen Sie die beiden Schrauben an der Vorderseite mit einen Schlitzschraubendreher
* Der Hutschienenaufsatz lässt sich jetzt entfernen
* An der Rückseite des ADAM Moduls werden zwei Kreuzschrauben sichtbar
* Entfernen Sie diese beiden Schrauben
* Das Gehäuseoberteil lässt sich jetzt leicht entfernen
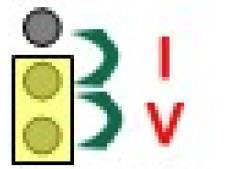
**Jumpereinstellung**
Die Jumper müssen nach Ihrer Funktionsweise konfiguriert werden
Dieses Signal kann für Strom (I) oder Spannung (V) eingestellt werden
[](https://anleitung.smart-dog.eu/uploads/images/gallery/2024-01/Mo84vDy1NbtgyXhT-image-1705588421659.png)
Dieser Jumper ist z.B.: für Spannung
(V) konfiguriert. Ein Hochsetzen
des Jumpers bewirkt eine
Umstellung des Signals auf
Strom (I).
[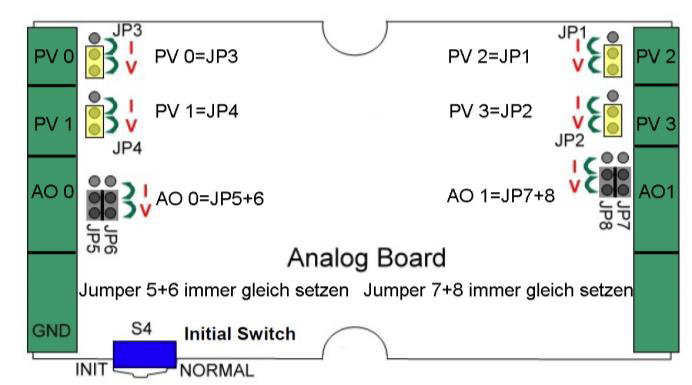](https://anleitung.smart-dog.eu/uploads/images/gallery/2024-01/vhgjorV2yUOTG7i4-image-1705588522196.png)
** Dieses Bild der Jumpereinstellung ist nicht universell anwendbar.
Beachten Sie die Vorgabe des Energieversorgers **
Der S4 „Initial Switch“ muss auf „Normal“ stehen.
**Eingänge: PV_0, PV_1, PV_2, PV_3**
Frei programmierbare Schnittstellen von 0-20mA, 4-20mA, 0-10V
**Ausgänge: AO_0, AO_1**
Frei programmierbare Schnittstellen von 0-20mA, 4-20mA, 0-10V
Nach erfolgreicher Jumperkonfiguration notieren Sie sich die
Einstellungen der Ein- und Ausgänge, wie Sie konfiguriert wurden
Danach muss das Gehäuse wieder verschlossen werden.
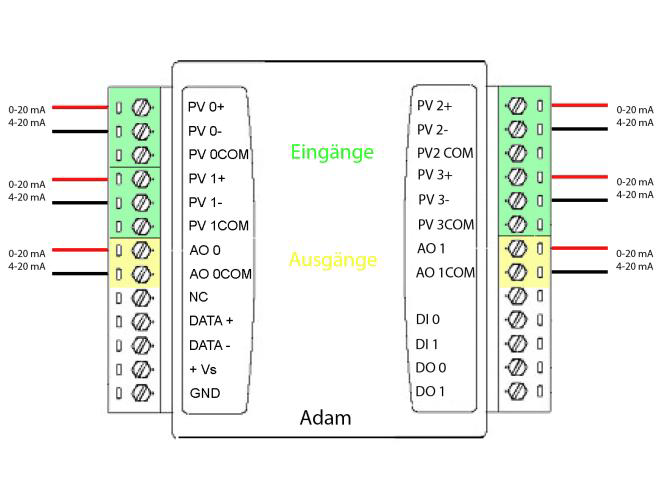
**EIN und Ausgänge für Stromanschluss**
Beachten Sie die Klemmenanschlüsse
[](https://anleitung.smart-dog.eu/uploads/images/gallery/2024-01/H3noVaQ9YYwJFcEf-image-1705588599813.png)
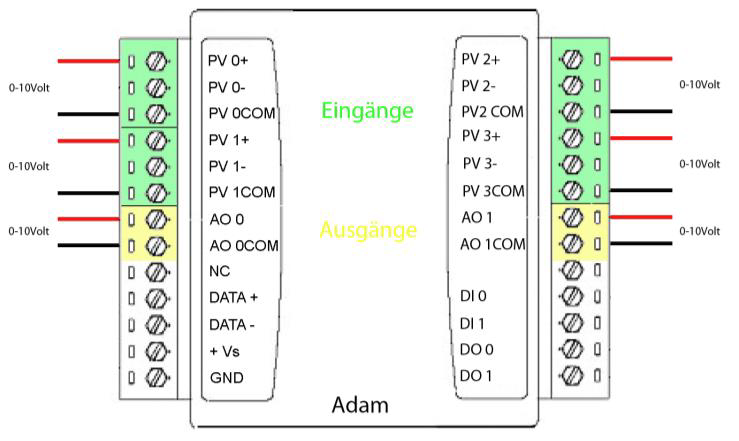
**EIN und Ausgänge für Spannungsanschluss**
Beachten Sie die Klemmenanschlüsse
[](https://anleitung.smart-dog.eu/uploads/images/gallery/2024-01/uQENaVy78BnrMhuR-image-1705588638974.png)
** Diese Bilder der Anschlüsse sind nicht universell anwendbar.
Sie dienen nur zur Übersicht der Klemmenanschlüsse am
ADAM für die jeweiligen Spannungen oder Stromeinstellungen **
## Verkabelung
[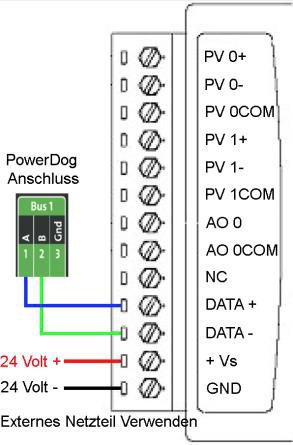](https://anleitung.smart-dog.eu/uploads/images/gallery/2024-01/AjhJMtgKqx6OzaJe-image-1705588160987.png)
## Anlegen des Bausteins
* Gehen Sie in die *Geräteeinstellungen* und dort mit *Weiter* auf Seite 2
* Wählen Sie *Remote IO* aus und legen mit dem *Grünen Plus* ein neues Remote IO an
* Wählen Sie *Modbus RS485* und dann *Adam 4022T*
[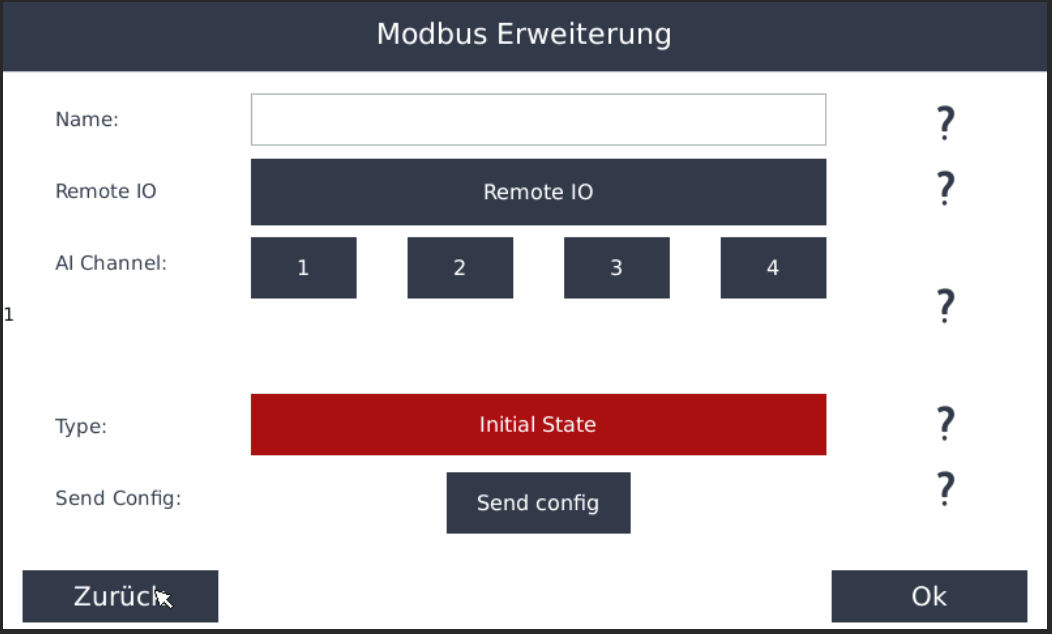](https://anleitung.smart-dog.eu/uploads/images/gallery/2024-01/RtHe5jvDj1HCnuUa-image-1705580891976.png)
**Name**
Legen Sie einen Namen für den Baustein fest
**Remote IO**
Mit klick auf den Button wird der Bus nach Geräten abgesucht, wählen Sie das gewünschte in der Liste aus
**AI Channel**
Nun können Sie die einzelnen Ausgänge auswählen und Ihnen einen Intial Status zuweisen
**Initial State**
Hier wählen Sie ob der Digitalausgang 1 oder 0 sein soll im Ausgangsstatus
**Send config**
Hier senden Sie die eingestellte Initial State Auswahl an das Gerät, dies müssen Sie nach jeder Änderung machen
**Bestätigen Sie mit 2 mal *OK* und anschließend mit *Speichern***
**Nach dem Speichern stehen nun weitere Eingänge
unter „Sensoren“ zur Verfügung**