PID-Regulation
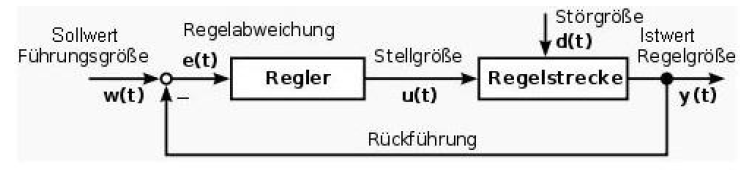
Übersichtsschaltbild
Funktionsweise des Bausteins
Der PID Regler beeinflusst selbstständig, in einem meist technischen Prozess, die physikalischen Größen so, dass ein vorgegebener Wert auch bei Störeinflüssen möglichst gut eingehalten wird. Dazu vergleichen Regler innerhalb eines Regelkreises laufend das Signal der „Führungsgröße (Sollwert)“ mit der gemessenen und zurückgeführten „Regelgröße (Istwert)“ und ermitteln aus dem Unterschied der beiden Größen der Regelabweichung (Regeldifferenz) eine „Stellgröße“, welche die Regelstrecke so beeinflusst, dass die Regelabweichung im eingeschwungenen Zustand zu einem Minimum wird. Weil die einzelnen Regelkreisglieder ein Zeitverhalten haben, muss der Regler den Wert der Regelabweichung verstärken und gleichzeitig das Zeitverhalten der Strecke so kompensieren, dass die Regelgröße den Sollwert in gewünschter Weise – von aperiodisch bis gedämpft schwingend – erreicht. Falsch eingestellte Regler machen den Regelkreis zu langsam, führen zu einer großen Regelabweichung oder zu ungedämpften Schwingungen der Regel-größe und damit unter Umständen zur Zerstörung der Regelstrecke. Dieser Regler Funktionsbaustein kann als P-Regler, I-Regler, PI-Regler, PD-Regler und PID-Regler verwendet werden
P-Regler
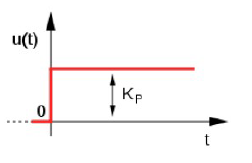
- Sprungantwort P-Anteil mit Kp
- Der P-Regler besteht ausschließlich aus einem proportionalen Anteil der Verstärkung
Kp.Kp Mit seinem Ausgangssignal u ist er proportional dem Eingangssignale.e
I-Regler
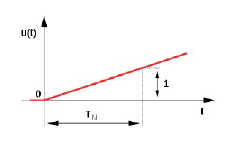
- Sprungantwort I-Anteil Ein I-Regler (integrierender Regler, I-Glied) wirkt durch zeitliche Integration der Regelabweichung e(t) auf die Stell-größe mit der Gewichtung durch die Nachstellzeit T_N.
D-Glied
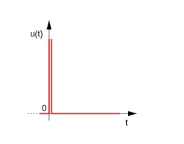
- Sprungantwort des idealen D-Gliedes Das D-Glied ist ein Differenzierer, der nur in Verbindung zu Reglern mit P-und/oder IVerhalten als Regler eingesetzt wird. Er reagiert nicht auf die Höhe der Regelabweichung e(t), sondern nur auf deren Änderungsgeschwindigkeit
Empirische Dimensionierung
- In der Praxis werden Regelkreise häufig ohne Verwendung eines Modells durch einfaches Ausprobieren von Regler Einstellungen realisiert. Die Regler Parameter werden einfach nach praktischen Erfahrungswerten vorgewählt und variiert. Deshalb ist diese Methode auch nur geeignet, um einfache Systeme zu dimensionieren
Die Vorgehensweise sieht dabei folgendermaßen aus
- Man beginnt zunächst mit einer unkritischen Einstellung, indem man P-Anteil klein wählt und I und D auf 0 setzt. Nun erhöht man langsam den P-Anteil so-lange bis die Dämpfung schlecht wird. Wenn hierbei eine Schwingungsneigung auftritt, wird die Verstärkung P etwas zurückgenommen. Anschließend nimmt man auch noch den Integralanteil und den Differentialanteil hinzu und erhöht diese auch langsam bis das Ergebnis einigermaßen akzeptabel ist. Wenn die Regelung dabei stabiler wird, kann man noch mal P oder I erhöhen und Testen bis alles passt.
Regler Anlegen
- Gehen Sie in der „Gerätekonfiguration“ auf „Regelungen“. Legen Sie mit dem „grünen Plus“ eine neue Steuerungsfunktion an. Drücken Sie den Button „Ausgänge“. Legen Sie den „PID-Regulation“ Funktionsbaustein an. Geben Sie bei „Name“ z.B.: „Steller 1“ ein. Wählen Sie bei „Istwert“ Ihren z.B.: PT1000 Temperatursensor der für den Istwert zuständig ist.

-
Bei „Wähle Sollwert“ wählen Sie z.B.: Fix Value und eine Temperatur von z.B.: 65°C. Hier haben Sie auch die Möglichkeit einen nicht fixen Sollwert zu wählen der z.B.: in Abhängigkeit einer Außentemperatur beeinflusst wird.
-
Geben Sie bei „Update rate“ die Geschwindigkeit vor wie oft diese Regelung aktualisiert werden soll z.B.: 3 s. Bei „positiv“ geben Sie die Regelrichtung vor. Diese Funktion wird bei z.B.: einer Überschussregelung auf „negativ“ geschaltet.
-
Bei „Min. Abweichung“ geben Sie den kleinsten Änderungsschritt vor z.B.: 5.
-
Bei „Ymin“ können Sie den Startwert festlegen. Dieser beginnt üblicherweise bei 0. Er kann jedoch auch höher liegen z.B.: 20.
-
Bei „Ymax“ können Sie den Endwert festlegen. Dieser Wert ist üblicherweise bei 100. Er kann jedoch auch niedriger liegen.
-
Bei „Kp“ geben Sie den Proportionalanteil an. Siehe P-Regler.
-
Bei „Ki“ geben Sie den Integralanteil an. Siehe I-Regler
-
Bei „Kd“ geben Sie den „Differentialanteil“ an. Siehe-D Glied.
-
Bei „Schnittstelle“ geben Sie bei „Select Interface“ den „Physikalischen Ausgang“ oder einen „Merker“ an.
-
Bei “Freigabe“ können Sie durch eine anderen Baustein die Regelung ein oder ausschalten.
-
Bestätigen Sie mit „OK“
-
Drücken Sie nun „Speichern“, um die Programmiereinstellungen zu übernehmen