PID-Regulation
 ->
->
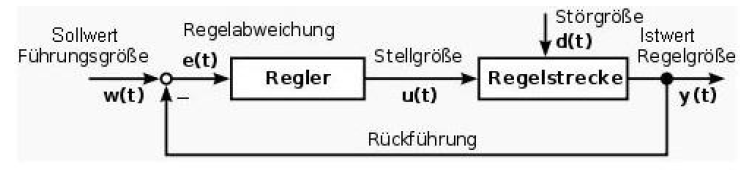
Übersichtsschaltbild
Funktionsweise
Dieser desFunktionsbaustein Bausteinskann als P-, I-, PI-, PD- oder PID-Regler verwendet werden
Funktion
-
Der
PIDPID-Reglerbeeinflusststeuertselbstständig,automatisch physikalische Größen in einemmeist technischenProzess,die physikalischen Größen so, dassdamit ein vorgegebenerWertSollwert möglichst genau eingehalten wird – auch bei Störeinflüssenrungenmöglichst -
eingehaltenVergleich
wird.vonDazuSoll-vergleichenund Istwert:- Regler
innerhalbmissteineskontinuierlichRegelkreisesdielaufendRegelgrößedas(Istwert) - Vergleicht diese mit der
„Führungsgröße (Sollwert)“ - Aus der
gemessenenDifferenzund(Regelabweichung)zurückgeführtenwird„Regelgröeine Stellgröße(Istwert)“ und ermitteln aus dem Unterschied der beiden Größen der Regelabweichung (Regeldifferenz) eine „Stellgröße“, welcheberechnet, dieRegelstreckedensoProzessbeeinflusst,beeinflusst
Signalmitdassdie - Regler
-
Ziel:
- Die Regelabweichung im eingeschwungenen Zustand
zumöglichsteinemminimalMinimumhalten
wird.Weil - Die Regelabweichung im eingeschwungenen Zustand
-
einzelnenBerücksichtigung
RegelkreisgliederdeseinZeitverhaltens:Zeitverhalten- Da
mussProzesse zeitabhängig reagieren, kompensiert der ReglerdendieWertDynamik derRegelabweichungRegelstrecke - So
und gleichzeitig das Zeitverhalten der Strecke so kompensieren, dasserreicht die Regelgröße den Sollwert in gewünschterWeiseForm–(von aperiodisch bisgedämpftleichtschwingendschwingend)
haben,verstärken–erreicht. - Da
-
eingestellteRisiken
ReglerbeimachenfalscherdenEinstellung:Regelkreis- Zu
langsam,langsameführenRegelung - Große
einerRegelabweichungen - Ungedämpfte Schwingungen der
Regel-gröRegelgröße - Im
damitschlimmstenunterFallUmständen zur ZerstörungBeschädigung derRegelstrecke.Regelstrecke
zuzugroßen Regelabweichung oder zu ungedämpftenundDieserRegler - Zu
-
Flexibilität:
- Der Baustein kann als P-
Regler,, I-Regler,, PI-Regler,, PD-Reglerundoder PID-Reglerverwendeteingesetzt werden
- Der Baustein kann als P-
Anlegen
- Mit dem grünen Plus-Symbol können Sie eine neue Regelung anlegen
- Wählen Sie anschließend Ausgänge und RID Regulation

Name
- Geben Sie einen Namen für den Baustein an
Istwert/Sollwert
- Wählen Sie beispielsweise „Fix Value“ und eine Temperatur von z. B. 65 °C
- Alternativ haben Sie auch die Möglichkeit, einen variablen Sollwert festzulegen, der beispielsweise in Abhängigkeit der Außentemperatur angepasst wird
Updaterate
- Geben Sie hier an, wie oft die Regelung aktualisiert werden soll
positiv/negativ
- Hier geben Sie die Regelrichtung vor
- Bei einer Überschussregelung wird diese Funktion beispielsweise auf negativ eingestellt
Min. Abweichung
- Hier legen Sie den kleinsten Änderungsschritt fest
YMin
- Legen Sie hier den Startwert fest
- Dieser beginnt üblicherweise bei 0, er kann jedoch auch höher liegen z.B.: 20
YMax
- Legen Sie hier den Endwert fest
- Dieser Wert ist üblicherweise bei 100, er kann jedoch auch niedriger liegen
Kp
- Hier geben Sie den Proportionalanteil an, siehe P-Regler
Ki
- Hier geben Sie den Integralanteil an, siehe I-Regler
Kd
- Hier geben Sie den Differentialanteil an, siehe D-Glied
Schnittstelle
- Wählen Sie die Schnittstelle die den Wert ausgeben soll
Freigabe
- Hier können Sie durch eine anderen Baustein die Regelung ein oder ausschalten
no Log / Log Local / Log Portal
-
Legen Sie fest, ob die Werte
-
nicht aufgezeichnet,
-
am Gerät gespeichert oder
-
im Portal aufgezeichnet werden sollen
-
Bestätigen Sie die Eingaben zweimal mit OK und anschließend mit Speichern
Reglerarten
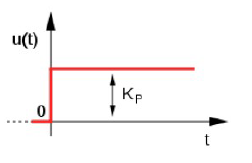
P-Regler
- Sprungantwort P-Anteil
mit Kp - Der P-Regler besteht ausschließlich aus
einemdem proportionalen AnteilderKp - Sein Ausgangssignal u ist
erdirekt proportionaldemzum Eingangssignal e
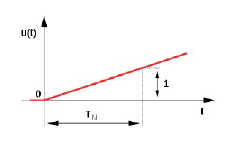
I-Regler
- Sprungantwort I-Anteil
- Ein I-Regler (integrierender Regler, I-Glied) wirkt durch zeitliche Integration der Regelabweichung e(t) auf die
Stell-gröStellgröße - Die
derWirkungGewichtungwird durch die NachstellzeitT_N.TN gewichtet
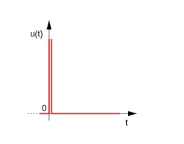
D-Glied
- Sprungantwort des idealen D-Gliedes
- Das D-Glied
istwirkteinalsDifferenzierer,Differenziererderund wird nur inVerbindung zu ReglernKombination mit P- und/oderIVerhalten als ReglerI-Reglern eingesetzt - Es reagiert nicht auf die Höhe der Regelabweichung e(t), sondern
nurauf deren Änderungsgeschwindigkeit
Empirische Dimensionierung
- In der Praxis werden Regelkreise
häufigoft ohneVerwendungexakteseinesModellModellsdimensioniert - Die
Regler ParameterReglerparameter werdeneinfachanhandnachvon praktischen Erfahrungswertenvorgewähltvoreingestellt undvariiert.dannDeshalbangepasst - Diese Methode
aucheignetnursichgeeignet,vorumallem für einfache Systemezu dimensionieren
Die Vorgehensweise sieht dabei folgendermaßen aus
Man beginnt zunächst mit einer unkritischen Einstellung, indem manP-Anteil klein wählthlen, I- undI und DD-Anteil auf 0setzt.setzen- P-Anteil
so-langeerhöhen: Langsam steigern, bis die Dämpfungschlechtkritisch wird.WennBeihierbei eine Schwingungsneigung auftritt, wird die VerstärkungSchwingungen Petwasleichtzurückgenommen.reduzieren - I- und
denD-AnteilDifferentialanteilhinzufügen:hinzuNach und nach erhöht diese auch langsamhen, bisdaseinErgebnisakzeptableseinigermaßenRegelverhaltenakzeptabelerreichtist. Wenn die Regelung dabei stabiler wird, kann man noch mal P oder I erhöhen und Testen bis alles passt.ist
Regler Anlegen
Gehen Sie in der „Gerätekonfiguration“ auf „Regelungen“. Legen Sie mit dem „grünen Plus“ eine neue Steuerungsfunktion an. Drücken Sie den Button „Ausgänge“. Legen Sie den „PID-Regulation“ Funktionsbaustein an. Geben Sie bei „Name“ z.B.: „Steller 1“ ein. Wählen Sie bei „Istwert“ Ihren z.B.: PT1000 Temperatursensor der für den Istwert zuständig ist.

Bei „Wähle Sollwert“ wählen Sie z.B.: Fix Value und eine Temperatur von z.B.: 65°C. Hier haben Sie auch die Möglichkeit einen nicht fixen Sollwert zu wählen der z.B.: in Abhängigkeit einer Außentemperatur beeinflusst wird.Geben Sie bei „Update rate“ die Geschwindigkeit vor wie oft diese Regelung aktualisiert werden soll z.B.: 3 s. Bei „positiv“ geben Sie die Regelrichtung vor. Diese Funktion wird bei z.B.: einer Überschussregelung auf „negativ“ geschaltet.Bei „Min. Abweichung“ geben Sie den kleinsten Änderungsschritt vor z.B.: 5.Bei „Ymin“ können Sie den Startwert festlegen. Dieser beginnt üblicherweise bei 0. Er kann jedoch auch höher liegen z.B.: 20.Bei „Ymax“ können Sie den Endwert festlegen. Dieser Wert ist üblicherweise bei 100. Er kann jedoch auch niedriger liegen.Bei „Kp“ geben Sie den Proportionalanteil an. Siehe P-Regler.Bei „Ki“ geben Sie den Integralanteil an. Siehe I-ReglerBei „Kd“ geben Sie den „Differentialanteil“ an. Siehe-D Glied.Bei „Schnittstelle“ geben Sie bei „Select Interface“ den „Physikalischen Ausgang“ oder einen „Merker“ an.Bei “Freigabe“ können Sie durch eine anderen Baustein die Regelung ein oder ausschalten.Bestätigen Sie mit „OK“Drücken Sie nun „Speichern“, um die Programmiereinstellungen zu übernehmen