Adam 4022T
Funktion
Hier können Sie das Zubehör Adam 4022T im SmartDog einbinden

Hinweis
Die Remote IO Schnittstelle „ADAM“ ist standardmäßig auf BUS-Adresse 1 eingestellt. Werden zusätzlich BUS-Zähler oder Wechselrichter angeschlossen, muss die Adresse der angeschlossenen Geräte angepasst werden.
Vor der Erst-Inbetriebnahme müssen die Jumper am ADAM richtig gesetzt werden. Diese Konfiguration ist abhängig von den Vorgaben des Energieversorgers.
Gehen Sie dazu wie folgt vor
- Lösen Sie die beiden Schrauben an der Vorderseite mit einen Schlitzschraubendreher
- Der Hutschienenaufsatz lässt sich jetzt entfernen
- An der Rückseite des ADAM Moduls werden zwei Kreuzschrauben sichtbar
- Entfernen Sie diese beiden Schrauben
- Das Gehäuseoberteil lässt sich jetzt leicht entfernen
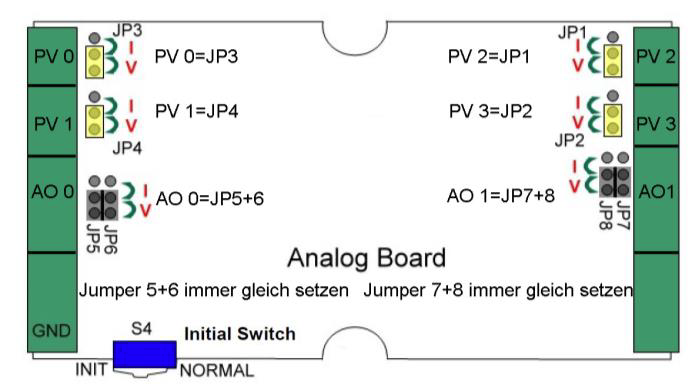
Jumpereinstellung
Die Jumper müssen nach Ihrer Funktionsweise konfiguriert werden
Dieses Signal kann für Strom (I) oder Spannung (V) eingestellt werden
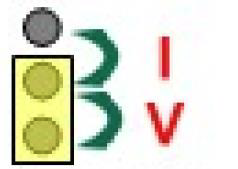
Dieser Jumper ist z.B.: für Spannung (V) konfiguriert. Ein Hochsetzen des Jumpers bewirkt eine Umstellung des Signals auf Strom (I).
Dieses Bild der Jumpereinstellung ist nicht universell anwendbar. Beachten Sie die Vorgabe des Energieversorgers
Der S4 „Initial Switch“ muss auf „Normal“ stehen.
Eingänge: PV_0, PV_1, PV_2, PV_3
Frei programmierbare Schnittstellen von 0-20mA, 4-20mA, 0-10V
Ausgänge: AO_0, AO_1
Frei programmierbare Schnittstellen von 0-20mA, 4-20mA, 0-10V
Nach erfolgreicher Jumperkonfiguration notieren Sie sich die Einstellungen der Ein- und Ausgänge, wie Sie konfiguriert wurden
Danach muss das Gehäuse wieder verschlossen werden.
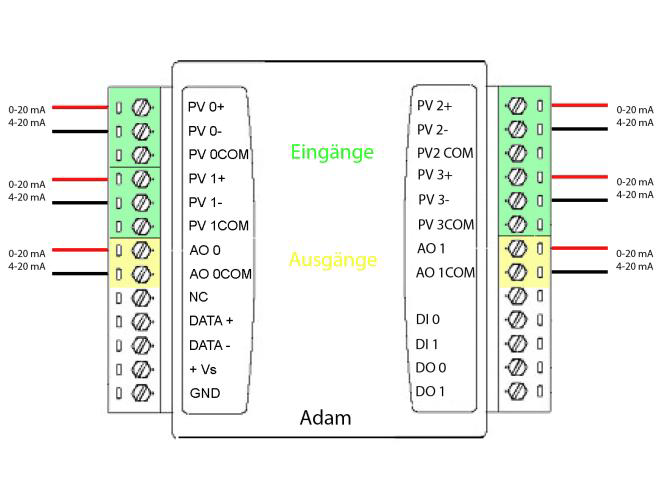
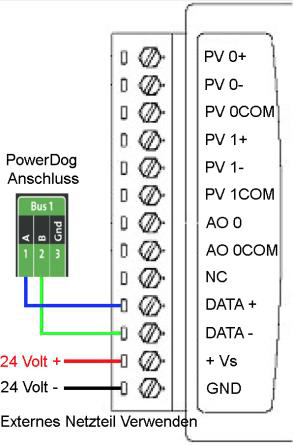
EIN und Ausgänge für Stromanschluss
Beachten Sie die Klemmenanschlüsse
EIN und Ausgänge für Spannungsanschluss
Beachten Sie die Klemmenanschlüsse
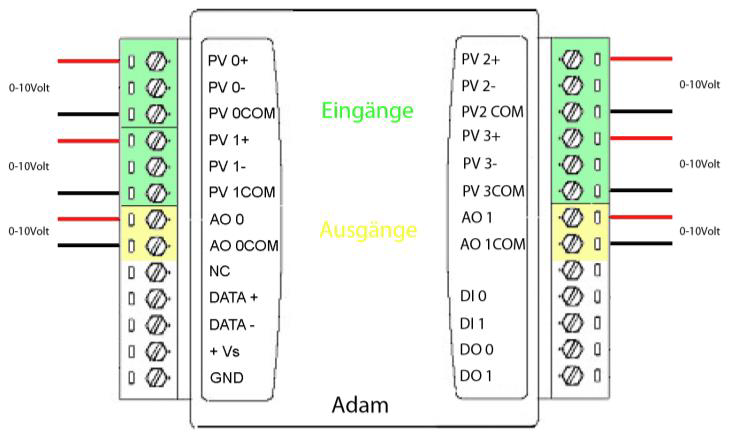
Diese Bilder der Anschlüsse sind nicht universell anwendbar. Sie dienen nur zur Übersicht der Klemmenanschlüsse am ADAM für die jeweiligen Spannungen oder Stromeinstellungen
Verkabelung
Anlegen des Bausteins
- Gehen Sie in die Geräteeinstellungen und dort mit Weiter auf Seite 2
- Wählen Sie Remote IO aus und legen mit dem Grünen Plus ein neues Remote IO an
- Wählen Sie Modbus RS485 und dann Adam 4022T
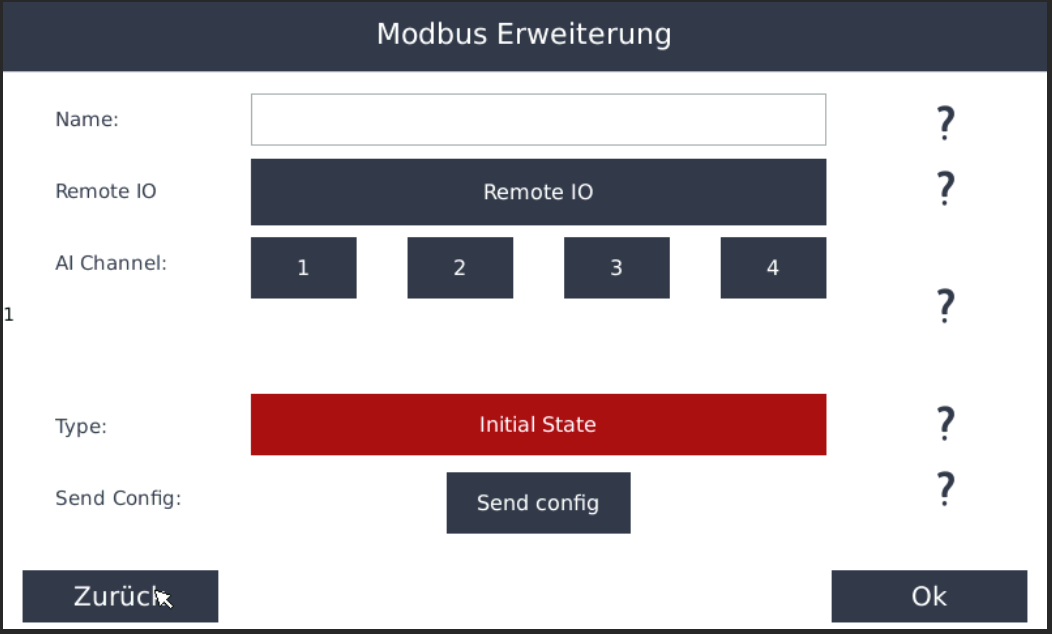
Name
Legen Sie einen Namen für den Baustein fest
Remote IO
Mit klick auf den Button wird der Bus nach Geräten abgesucht, wählen Sie das gewünschte in der Liste aus
AI Channel
Nun können Sie die einzelnen Ausgänge auswählen und Ihnen einen Intial Status zuweisen
Initial State
Hier wählen Sie ob der Digitalausgang 1 oder 0 sein soll im Ausgangsstatus
Send config
Hier senden Sie die eingestellte Initial State Auswahl an das Gerät, dies müssen Sie nach jeder Änderung machen
Bestätigen Sie mit 2 mal OK und anschließend mit Speichern
Nach dem Speichern stehen nun weitere Eingänge unter „Sensoren“ zur Verfügung